存在问题
酒曲从培养车间通过输送线送来时,来料位置与姿态不固定,易卡料;人工搬运速度已达极限,无法匹配前端产能提升计划;人工码垛的整齐度、紧密度不一,在后续叉车转运中偶有塌垛风险。
服务成果
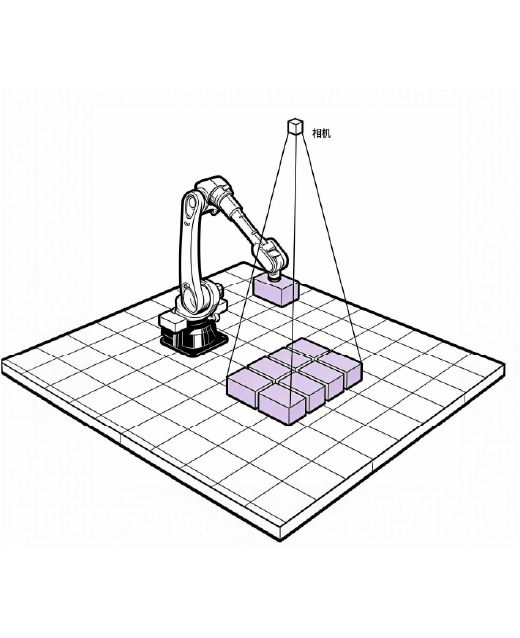
根据工作距离和视野范围,采用手眼分离系统,在屋顶固定安装高精度3D相机,搭载视觉处理定位算法和软件,快速完成抓取坐标计算与转换,实时传输至机械臂,将酒曲精准放置到对应的曲块架或存储区域,最大化节拍和效率。
Technical Introduction of the Solution
方案技术简介
手眼标定
精度的标定板3D相机,对于每个位姿,相机通过图像计算出标定板在相机坐标系下的位置和姿态。
坐标换算
计算相机坐标系下的抓取点,转换到机械臂能够理解的基坐标系下。
定位算法
获取视野内的深度图(Depth lmage)和对应的彩色图(RGB Image),并合成点云(Point Cloud)。
指令发送
将计算出的抓取指令安全、可靠地传递给机械臂控制系统。